一、公司概况
广州麓智科技有限公司成立于2024年4月,是研究院内部孵化技术创新公司,麓智科技专注于机器人视觉感知与控制技术的研发和应用,依托机器人视觉感知与控制技术国家工程研究中心、智能系统多模态控制技术与应用教育部工程研究中心、电子制造业智能机器人技术湖南省重点实验室等国家级和省级科研平台,公司在机器人自动化系统实时视觉感知、精准执行控制、高效优化决策等关键技术方面取得了突破。
研发基地概况
麓智科技在广州、苏州和泉州等地建立了应用研究基地,致力于机器人智能技术的研究、开发和应用。公司拥有一支多学科、高水平的研发团队,固定研究人员32人,其中包括14名教授和10名副教授,80%以上具有博士学位。团队拥有先进的实验设备和技术平台,结合深度学习、机器视觉、自主导航、人机交互等领域的前沿技术,不断推动智能机器人的发展和应用。
二、产品与优势
核心技术和主营产品
1、核心技术
(1)多源信息融合的移动机器人高精度定位
利用指纹点信息丰富,弥补单一传感器不足进行移动机器人自主建图
离线建图,多源信息融合方式多样, 场景适应性强,大规模动态场景下, 定位精度高。
(2)高速高精度三维视觉信息获取
提出高频相移结构光单目三维成像技术,比国际知名多频外差相移法精度提升 59%,投影图数量减少 50%,实现低成本高速高精度三维成像。
(3)基于三维信息的机器人伺服视觉控制
创新点:
n 高频相移法实现的多参数相位拟合标定方法(操作简单/精度高/误差稳定)
n 基于主动投射相位的建模补偿法(操作简单/精度高/误差稳定)
n 高频相移编解码的结构光高精度三维成像(速度快/精度高/误差稳定)
2、主营产品:
(1)智能移动服务机器人
团队将地图创建与自定位、场景目标识别与理解等技术成功应用于湖南荣乐、湖南格兰博等公司;销售至湖南卫视、诗词大会、天津图书馆、长沙博物馆、长沙地铁、江苏“八礼四仪”体验馆等长沙地铁图书馆
(2)轨道交通设备清洁机器人
系统架构创新:多机协同+一体化集成设计"车底清洁机器人+车侧清洁机器人+除尘柜"集成架构,实现车底与车侧同步吹扫、实时除尘的闭环作业。
本项目针对地铁车辆关键维护场景,成功研发出一套适用于地铁车侧与车底区域的专用智能清扫机器人系统,有效攻克了传统清洁方式效率低、效果差的行业痛点。该系统深度集成高精度传感器技术、AI视觉识别算法及自适应清洁设备三大核心技术,已实现地铁车侧、车底区域清扫的自动化、精准化与高效化。

(3)具身人形机器人
团队自主研发了面向多维度场景智能服务机器人系统。该系统基于ACT模仿学习框架进行深度优化,在任务泛化能力、环境适应性和操作精度三大核心指标上达到国际先进水平。

(4)3D视觉缺陷检测
3D视觉检测技术应用于汽车缸体缺陷检测,检测精度可达10微米,成功率≥99%。

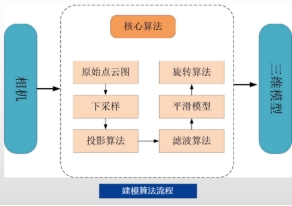
(5)高精度高速三维视觉建模系统
配备行业领先的3D相机与旋转平台,仅需数秒即可完成扫描使用先进的点云处理与3D建模算法,将部分手镯点云转换为完整三维模型,彻底实现"管中窥豹"研发出全套三维手镯建模解决方案,完美结合硬件平台与算法模型,搭配友好的人机交互设计。无需知晓原理,各种手镯的建模仅需"轻轻一点"
(6)面向特种作业的无人机巡检系统
定位算法:以RTK 载波相位差分技术实现高精度空间定位:无人机、地面基站均需配置RTK 模块,通过实时处理两站载波相位观测的差分方法,基站将采集的波相位传至无人机接收机,实现测量点三维定位并差分校正误差,空间定位精度可达厘米级。依托该技术,无人机按规划航线抵达目标方位后拍摄高分辨率图像。
路径规划算法:无人机巡检路径由路径搜索算法结合基于梯度的轨迹优化算法生成满足约束的轨迹:通过参数化 B样条方法得到轨迹控制点,优化控制点位置以调整轨迹,满足光滑性、可行性、无碰撞约束,实现复杂场景下的快速移动。

三、联系方式
联系人:胡志伟
电话:15367652306
邮箱:1343617841@qq.com
地址:广州市增城区宁西街金融大道10号3栋8层803房












